Abstract
Swarm robotics holds the potential to achieve performance surpassing the capabilities of individual robots through the collaboration of numerous robots. However, the limitations in environmental sensing capabilities that arise from increasing the number of robots have become one of the factors hindering this potential.
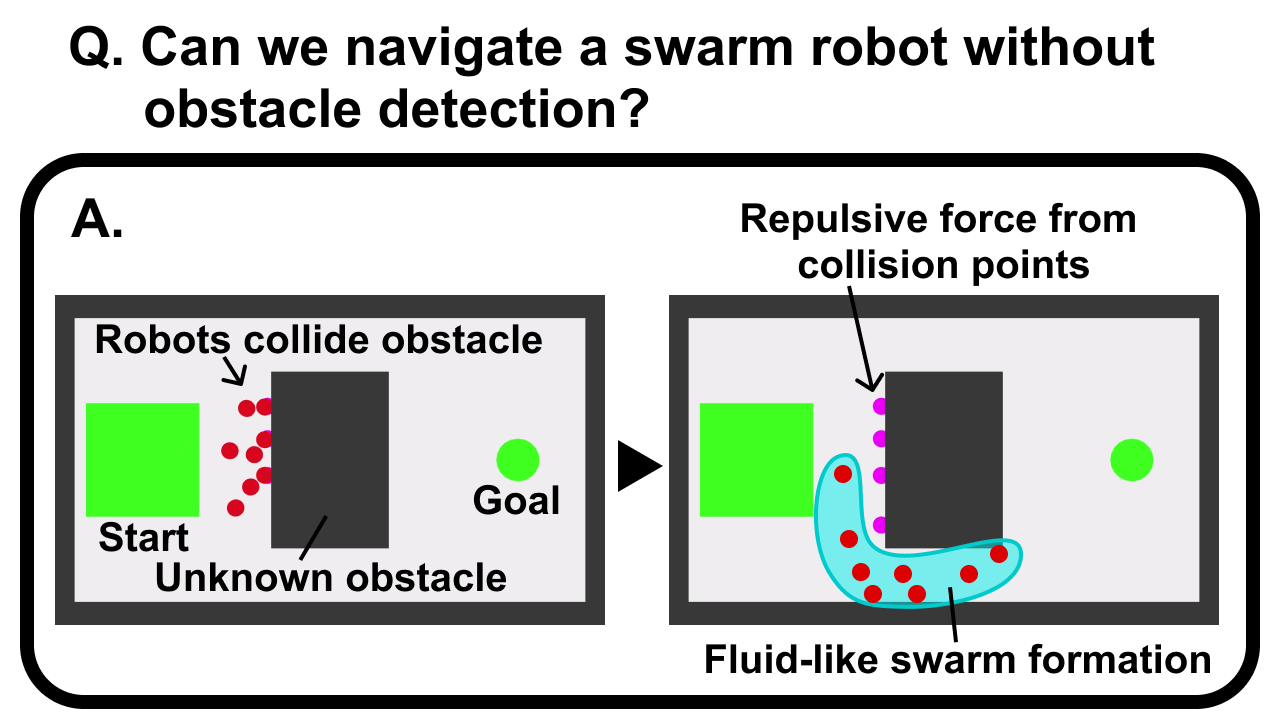
Therefore, we proposed a swarm robot control method using Indirect Collision Detector and Smoothed Particle Hydrodynamics (SPH) to move swarm robots to their intended positions while avoiding obstacles, even without environmental sensing capabilities. This controller indirectly detects contact points between robots and obstacles using only the position and velocity information of the robots. Then, by using repulsion from the contact points and a fluid-like swarm formation based on the SPH method, we enabled reliable and efficient obstacle avoidance.
Papers
Michikuni Eguchi, Mai Nishimura, Shigeo Yoshida, and Takefumi Hiraki, “Robot Swarm Control Based on Smoothed Particle Hydrodynamics for Obstacle-Unaware Navigation,” In Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 8 pages, 2024.10. (To Appear)
arXiv