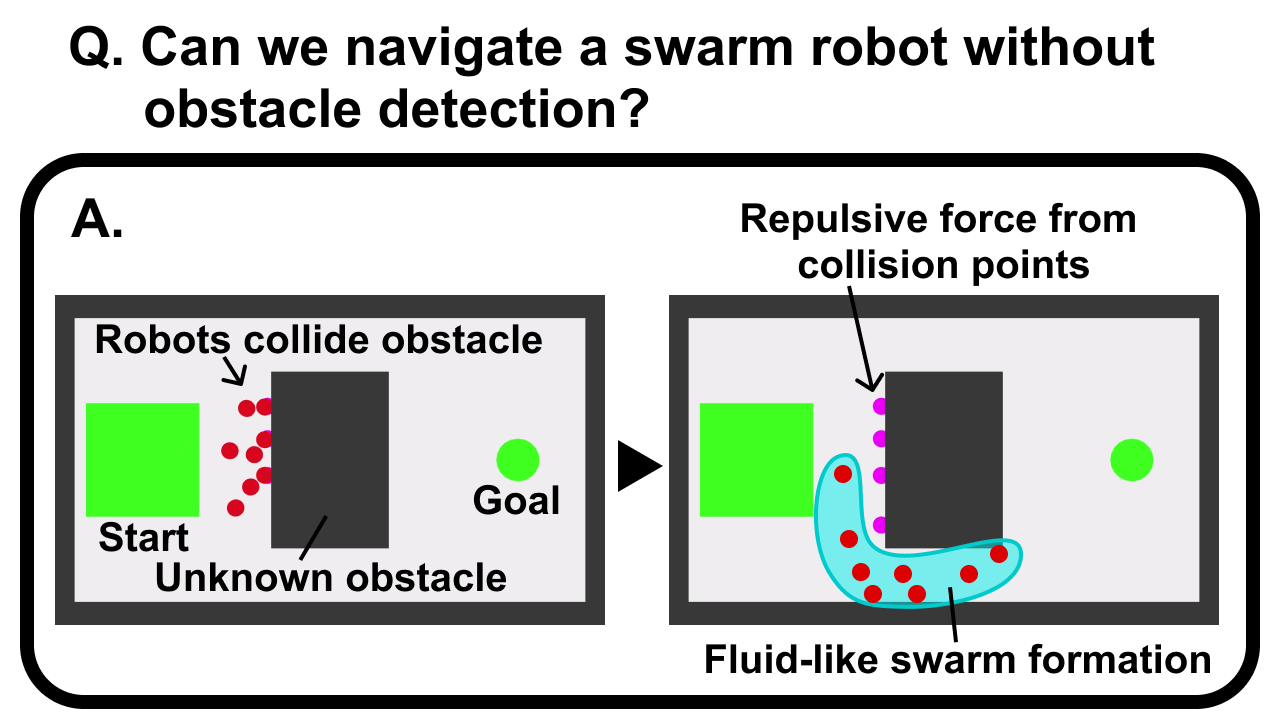
Smoothed Particle Hydrodynamics を用いた障害物非認識環境における群ロボットナビゲーション
(IEEE IROS 2024)
ロボットの環境センシング能力がなくとも、障害物を回避し目的の位置まで群ロボットを移動させるために、Indirect Collision DetectorおよびSmoothed Particle Hydrodynamics (SPH) による群ロボット制御法の提案を行いました。本制御器ではロボットの位置と速度情報から間接的にロボットと障害物との接触点の検出を行います。そして、接触点からの反発およびSPH法による流体的な群フォーメーションにより、確実にかつ効率的な障害物の回避を可能としました。
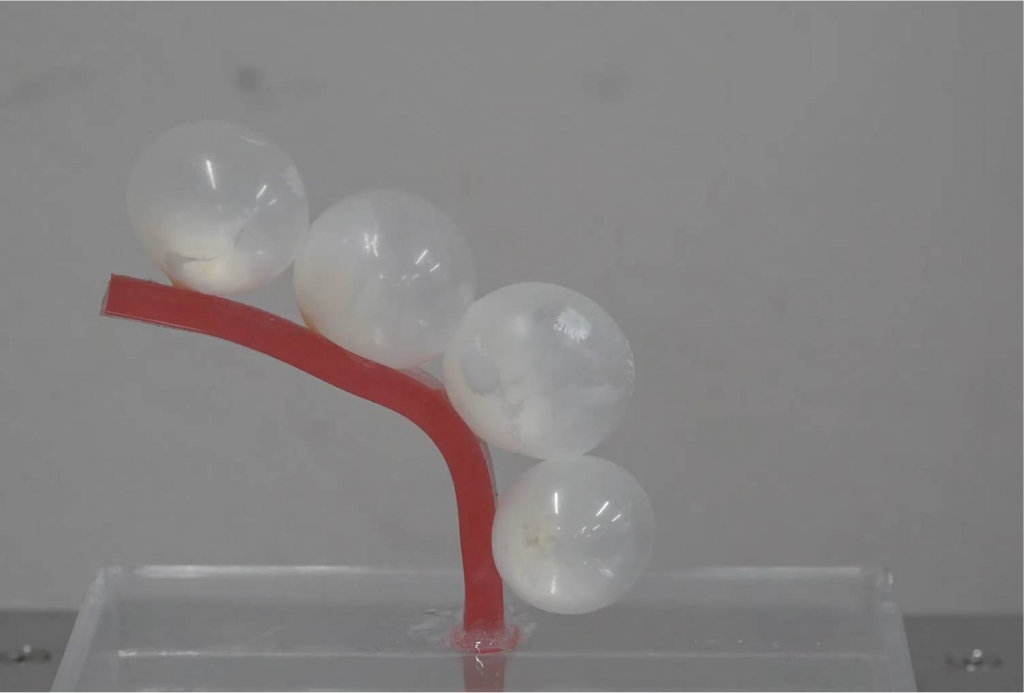
Micro Elastic Pouch Motors: 弾性変形可能な小型相転移アクチュエータ
(IEEE RA-L 2021, IEEE RoboSoft 2021)
Micro Elastic Pouch Motorsは、伸縮性のあるラテックスゴム製のパウチに低沸点液体を注入して作製される、小型でやわらかい相転移アクチュエータです。低沸点液体の温度が34 ˚Cになると、パウチ内の液体が気化することで全体が膨張し、駆動します。提案した製造方法により、薄いゴム膜で直径約5 mmと小型のパウチを作製可能で、また、パウチは初期体積の86倍以上に膨らむことで最大約20 Nの力を発生させることができます。

CoVR: HMD視点映像のプロジェクタ投影によるVR体験共有システム
(ACM SIGGRAPH Asia 2020 ETech)
HMDを装着しているユーザと、装着していないユーザの間でVR体験を共有することは、その体験ギャップを埋めるための有望なアプローチです。そこで、HMDにフォーカスフリーなレーザプロジェクタを搭載したHMDデバイスを用いて、HMD装着ユーザと非装着ユーザ間でユーザー視点の画像を投影して共有するシステム、CoVRを提案しました。それぞれのユーザに提示される画像に付加情報を加えて、視点と遠近感を考慮した画像を表示する設計手法を紹介し、その応用例を示しました。